Hírfolyam
Ugrásra készen - új mozgáslabor a MOGI tanszéken
2016. 01. 12.A legújabb robotikai és etorobotikai vizsgálatokra alkalmas eszközökkel felszerelt mozgáslabort adtak át a BME Gépészmérnöki Karán.
„Műegyetemi berkekben egyedülálló ez a kutató és fejlesztő laboratórium, amely a tanszék és az ott végzett szakmai munka sokszínűségének megtestesítője, az oktatás és a kutatás modern eszközökkel felszerelt színtere” – fogalmazta meg Czigány Tibor, a BME Gépészmérnöki Kar dékánja a GPK Mechatronika, Optika és Gépészeti Informatika Tanszék (MOGI) mozgáslaborjának átadásakor. A GPK legújabb kutatóhelyiségét a tanszék saját forrásokból hozta létre.

„Főként a mozgás-, a robotikai és az etorobotikai kutatásokhoz a legkorszerűbb eszközöket biztosítjuk a biológus-, mérnök- és orvos-kutatók számára” – fűzte hozzá Kiss Rita, a labort alapító tanszék helyettes vezetője. (Az etorobotika kutatói állatok viselkedésének törvényszerűségeit, szokásait vizsgálják. Megfigyeléseik alapján új típusú robotot alkotnak meg: az ehhez szükséges eszközöket és programokat dolgozzák ki, létrehozva egy algoritmizálható matematikai modellt, amelyet a mechatronikai mérnökök robotokba vagy más eszközökbe építenek be. A tudósok célja olyan gépek létrehozása, amelyek képesek szociális interakciókra, vagy akár képesek beilleszkedni az emberi csoportokba is – szerk.). Kifejtette, hogy az új labor fontos szerepet játszhat különböző egészségügyi vizsgálatok továbbfejlesztésében is. „Az itt dolgozó szakemberek célja részben olyan módszerek kidolgozása és ellenőrzése, amelyek a későbbiekben a mindennapi gyakorlat részeként segítik a mozgással kapcsolatos egészségügyi problémákkal küszködőket, például a combnyaktörést szenvedett betegek gyógyulását, vagy mozgássérült gyermekek rehabilitációját.”

Korondi Péter tanszékvezető egyik álmának megvalósítását köszöni meg Kiss Ritának és munkatársainak
Kiss Rita utalt arra, hogy a karon a mozgásvizsgálatok kutatása több éves múltra tekint vissza: a témával kapcsolatos kari kutatások a biomechanikai vizsgálatokkal kezdődtek, amikor a bénult betegek felső végtagjának tornáztatását segítő robotot fejlesztettek a kollégák. Ma már a biomechatronika (a biológiailag inspirált gépek tudománya – szerk.) valamennyi területén fontos kutatásokat végeznek. Biológiai elvek alapján új mérnöki szerkezeteket hoznak létre, tökéletesítik a meglévő eszközöket, e mellett az élet jobb megértését és az életminőség javítását segítő modelleket készítenek mechanikai módszerekkel. A most felavatott tudományos műhely megalapításánál fontos szempont volt, hogy alkalmas legyen az emberi mozgások, a robotikához és etorobotikához kapcsolódó állat- és robotmozgások együttes rögzítésére, mérésére, valamint ezek numerikus és grafikus megjelenítésére is. „Az adatok feldolgozása valós időben történik, azaz, a képernyőn azonnal megjelenik a mozgás grafikus modellje” – ecsetelte Kiss Rita. Hangsúlyozta, hogy a tanszék kiemelkedő szerepet szán különböző egészségügyi vonatkozású kutatásoknak, melyek szorosan kapcsolódnak a hallgatók egészségügyi intézményben vagy egészségügyhöz kapcsolódó cégeknél végzett szakmai gyakorlatához, a szakdolgozatok, a TDK-dolgozatok vagy a diplomamunkák kutatásaihoz. A tanszékvezető-helyettes megosztotta, hogy a jövőben ezt az egészségügyi kutatási irányt tovább erősítik, és céljuk a laboratóriumot nyomásérzékelőkkel ellátott padlózattal és az izomaktivitás mérésére alkalmas elektromiográffal is felszerelni.
Ajtónállók, köztük Ethon, a köszöntő robot
A megnyitón a tanszék kutatói bemutatták azokat a szakterületeket, amelyeken jelentős eredményeket értek el, és amelyeket tovább kívánnak folytatni.
Tamás Péter, a MOGI Tanszék docense, a gépészeti informatika szakértője szerint a most megnyitott mozgáslabor új távlatokat nyit a kutatásaikban, hiszen – többek között – a gerincbeteg gyermekek mozgásának vizsgálatához és elemzéséhez biztosítja a feltételeket. Beszámolt a „Gerincőr” mozgásfejlesztési projekt keretében végzett fejlesztéseiről és kutatási eredményeiről, kiemelve a 3D testszkennert, ill. a gerincbetegségek szűrésére alkalmas mérőeszközöket, a gerinc-rendellenességek kezelését segítő intelligens korzetthez (gerincferdülés kezelésére használt segédeszköz – szerk.) kapcsolódó fejlesztéseket.
„A labor hozzájárul az optikai vizsgálatok sikerességéhez is” – fogalmazott Antal Ákos, a MOGI Tanszék adjunktusa, aki előadásában példákkal szemléltette az érintésmentes felületvizsgálatok végrehajtását a fénytan moiré-jelenségének segítségével (két vagy több hullám szuperpozíciójával kialakuló interferencia eredményeként létrejövő új hullám mintázat, segítségével felületi egyenetlenségeket, testi aszimmetriákat lehet feltárni – szerk.). E módszer széleskörűen alkalmazható az ortopédiában: a gerincferdülés, a hanyag testtartás és más aszimmetriák felfedezésére.

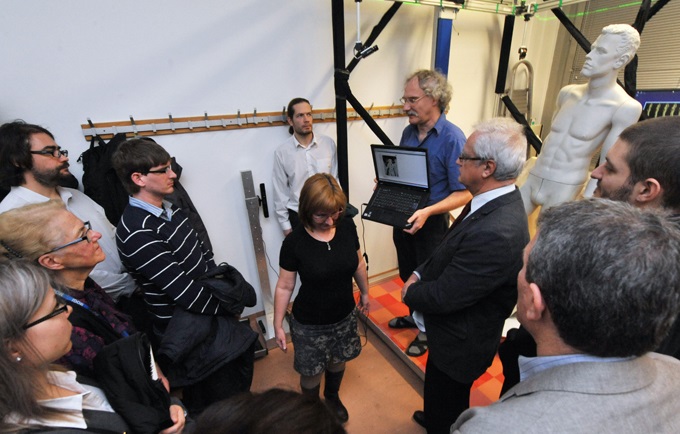
Devecseri Viktor és Urbin Ágnes doktoranduszok az új mozgáslabor lehetőségeit mutatják be
A labor optikai-alapú kamerarendszeréről Devecseri Viktor PhD-hallgató számolt be. Saját fejlesztésű számítógépes programjával a labor 5*6 méteres mozgásterének optimális kameraszámát és azok elrendezését határozta meg. Devecseri Viktor javaslata alapján 18 infravörös fénytartományban működő kamera végzi a képfeldolgozást. A rendszer saját programja az ún. motion capture (digitális mozgásrögzítés – szerk.) technológiára alapozva határozza meg a test jellegzetes pontjaira rögzített fényvisszaverő markerek térbeli koordinátáit, amelyekkel kiszámolhatók a mozgás jellegzetes paraméterei, és összeállítható egy csontváz-modell.
A labor optikai eszközeinek kiépítésével foglalkozott Nagymáté Gergely PhD-hallgató is, aki a kamerák kalibrációs méréseinek problematikáját tárta fel. A referenciaháló pontjainak térbeli koordinátáit Rózsa Szabolcs, a BME Építőmérnöki Kar Általános és Felsőgeodéziai Tanszék vezetőjével geodéziai módszerek bevetésével adta meg. A referencia hálózathoz végzett kalibrációs mérésekkel kimutatható, hogy a jelenlegi közel 1 centiméteres hiba további kamerák beiktatásával akár 5 milliméterre csökkenthető.
„Az ember könnyebben él együtt egy nála kisebb és eltérő kinézetű önjáró gépi társsal, így az ember szolgálatára kitalált robotok nagy valószínűséggel nem emberalkatúak lesznek” – osztotta meg elképzeléseit a robotika jelenéről és jövőjéről záró előadásában a MOGI Tanszék vezetője, Korondi Péter. „A robotika óriási paradigmaváltás előtt áll. Korábban a robotokat szinte kizárólag nagyipari környezetben, elsősorban autógyártásban alkalmazták: e szerkezetek többsége csak az apró, leegyszerűsített és 'szögletes' mozdulatsorok végrehajtására volt alkalmas. Ám a kisebb robotokat ma már kis- és középvállalkozásoknál is használják, és rövidesen megjelenhetnek az emberek hétköznapjaiban is” – hívta fel a figyelmet.

MOGI Robi, a "legépebb gép-eb"
A jövőbeli tervekről elmondta, hogy a műegyetemi mozgáslabort hamarosan négylábú tesztalanyokkal, azaz kutyákkal is felavatják. Emellett új, eddig nem végzett kísérletekhez is berendezik a kutatóhelyiséget: a laborban vizsgált tesztrobotokba épített számítási kapacitás ugyanis még nem elegendő a gyors és valós idejű kép- és hangfeldolgozáshoz, így az arc-, a hang- és a beszédfelismeréshez, vagy az emberre kapcsolt biológiai szenzorok jeleinek kiértékeléséhez. E célra új eszközöket és programokat kívánnak elhelyezni az intelligens térben, azaz egy olyan környezetben, amely kiépített szenzorok segítségével információt és fizikai támogatást nyújt a kutatóknak a számítási feladatok támogatására a robotok teljesítményének javításához.
TZS - TJ
Fotó: Herczeg József